Este es un programa sencillo que permite controlar dos motores mediante el uso de un PIC previamente programado en MikroC.
La función que realiza es la siguiente:
1) Giro de ambos motores a derecha
2) Detiene el movimiento de ambos motores
3) Giro de ambos motores a izquierda
4) Giro del primer motor y detiene el segundo
5) Detiene el primer motor y giro del segundo
El entorno de simulación es ISIS de Proteus v8.0, el compilador es MikroC Pro.
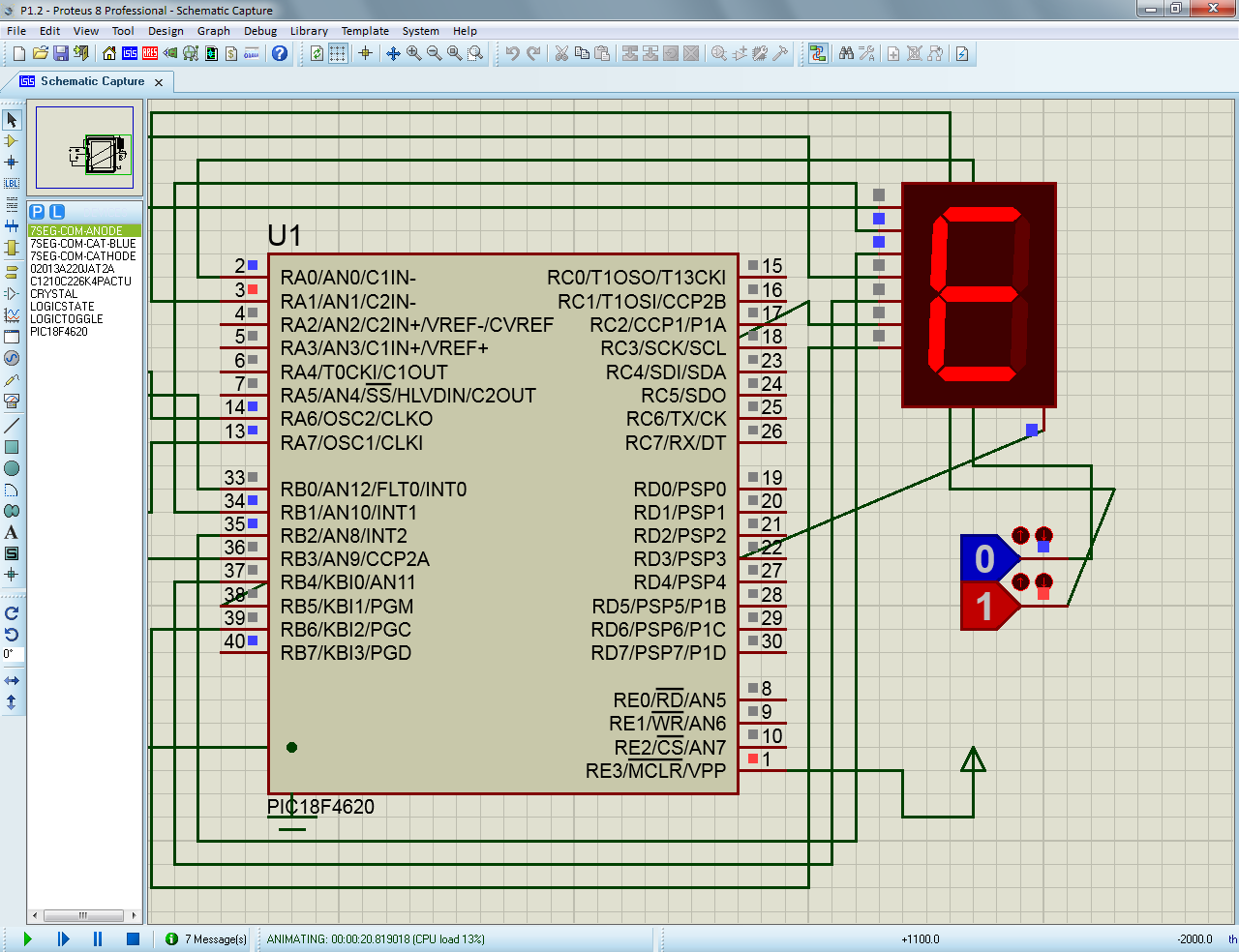
A continuación se muestra el esquema de las conexiones:
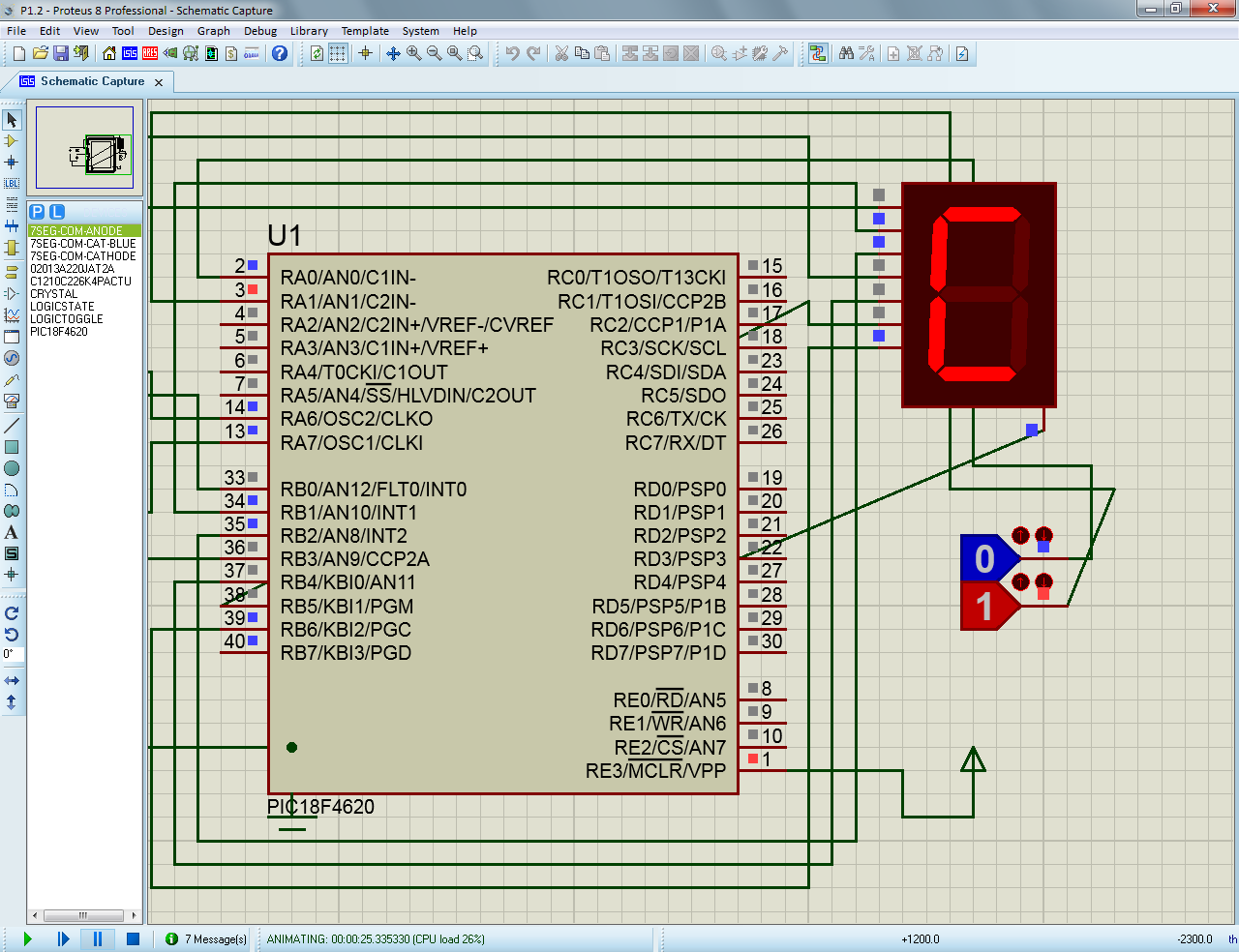
Finalmente la captura de pantalla de la simulación ejecutándose.
Nota: Dado que la velocidad de giro de los motores es alta, la impresión de pantalla puede parecer idénticas; sin embargo, es conveniente observar los estados de cada elemento para constatar que nuestra simulación es la correcta, y con esto me refiero a los cuadros azules o rojos que aparecen a ejecutar la simulación y que nos sirven de auxiliar para saber que estado tiene cada componente en cada etapa.